Social Robot Navigation: A Review and Benchmarking of Learning-Based Methods
Abstract
The integration of robots into human environments demands advanced social navigation capabilities for safe and fluid interactions in shared spaces. This review examines recent progress in learning-based social navigation methods, harnessing deep learning to navigate the complexities of human-robot coexistence.
We categorize and analyze a diverse array of architectures and core components, from the development of realistic training environments to the design of objectives that promote socially aware behavior. Through a comprehensive benchmark of existing frameworks, we highlight both their advantages and shortcomings, offering critical insights into the architectural decisions that shape performance in social scenarios. By mapping current trends and outlining ongoing challenges, this review lays out a strategic roadmap for future research aimed at enhancing social navigation systems for broader deployment.
Social Navigation Algorithms
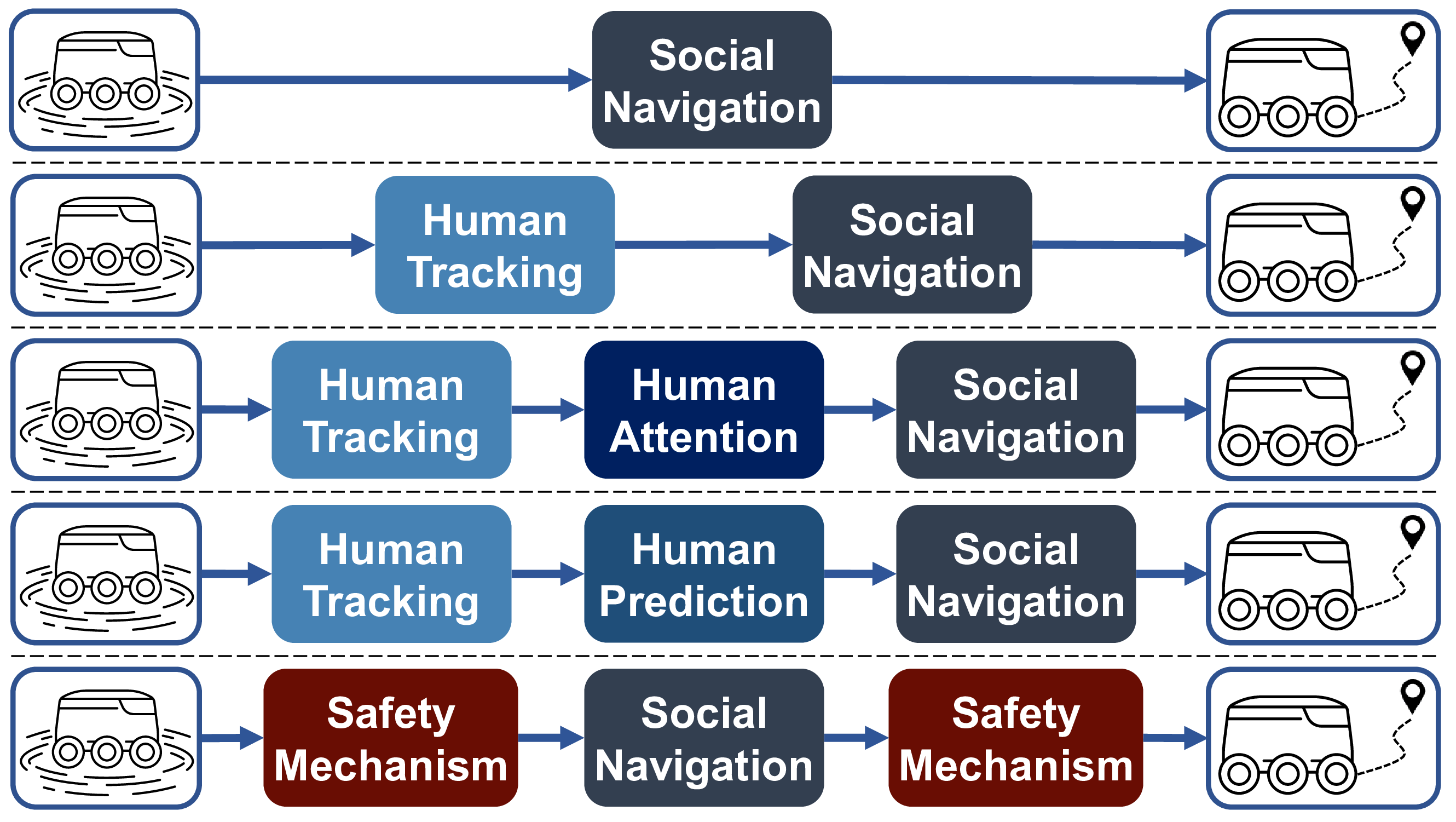
Social navigation algorithms are categorized based on their computational complexity and the specific modules they require, such as human detection, tracking, and prediction. This classification organizes social navigation strategies into five main categories, ranging from simpler end-to-end models to sophisticated multi-policy and prediction-based methods
BibTeX
@article{alyassi12social,
title={Social Robot Navigation: A Review and Benchmarking of Learning-Based Methods},
author={Alyassi, Rashid and Cadena, Cesar and Riener, Robert and Paez-Granados, Diego},
journal={Frontiers in Robotics and AI},
volume={12},
pages={1658643},
publisher={Frontiers}
}